Imagine trying to balance a broomstick on your hand. You move your hand in response to its tilting, trying to keep it upright. This is essentially what a PID controller does, but in the realm of engineering and automation. Intrigued? Let’s dive deeper into the world of PID controllers.
What Is a PID Controller?
A PID controller, short for Proportional-Integral-Derivative controller, is a control loop mechanism extensively used in industrial control systems. It continuously calculates an error value as the difference between a desired setpoint and a measured process variable, then applies a correction based on proportional, integral, and derivative terms.
The beauty of a PID controller lies in its simplicity and effectiveness. By adjusting these three parameters, a PID controller can provide control action designed for specific process requirements. This makes it versatile in various applications, ranging from simple household devices to complex industrial machinery.
How It Works
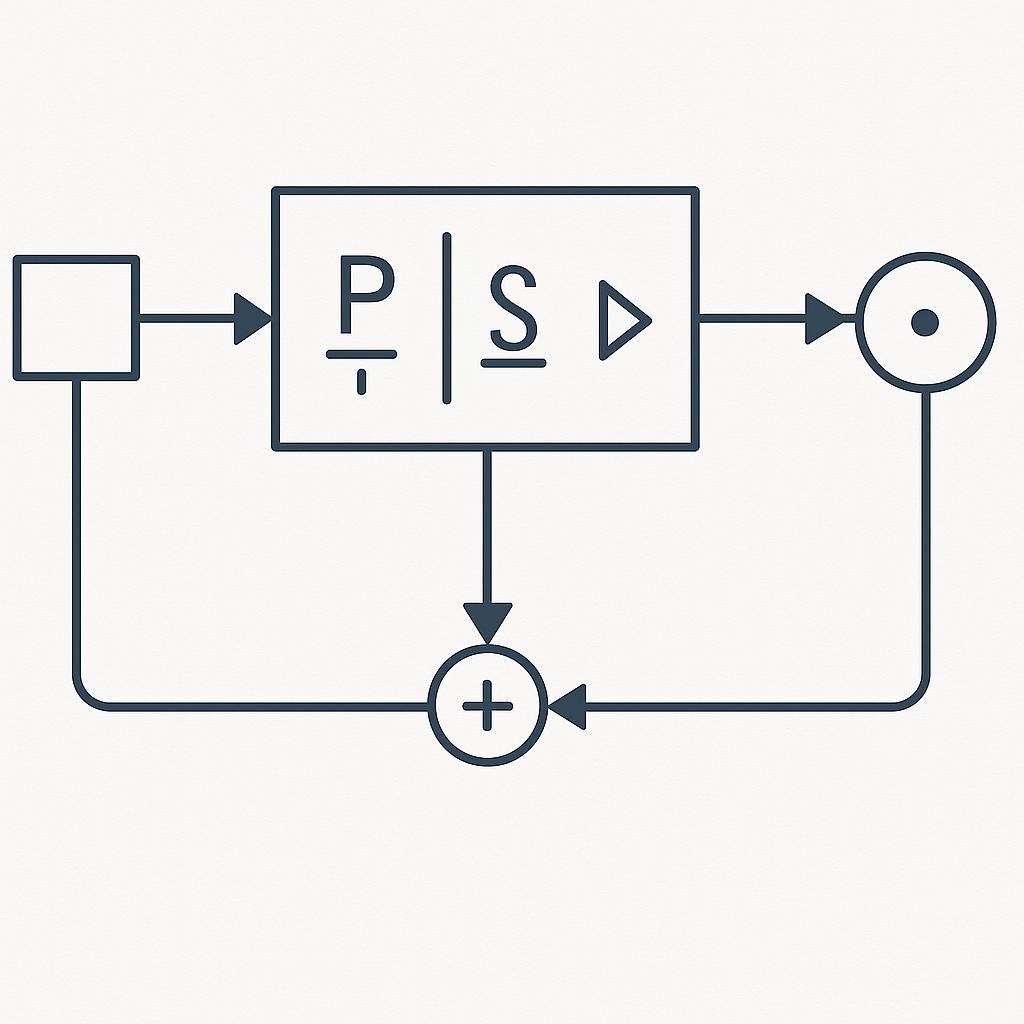
The operation of a PID controller can be broken down into three components:
- Proportional (P): This part produces an output value that is proportional to the current error value. Simply put, if the error is large, the correction will also be large.
- Integral (I): This component sums up past errors to eliminate residual steady-state error that a proportional controller might not correct. It ensures that over time, the controlled system reaches the desired setpoint.
- Derivative (D): The derivative component predicts future error based on its rate of change. It acts as a dampener, reducing overshoot and improving stability by reacting to the speed of error change.
By tuning the proportional, integral, and derivative constants (commonly known as P, I, and D gains), one can adjust how the PID controller responds to changes in the error. This tuning is crucial to the performance of the system being controlled.
Step-by-Step Guide to Tuning a PID Controller
Tuning a PID controller can seem daunting, but by following a systematic approach, you can achieve optimal performance. Here’s a practical step-by-step guide:
- Step 1: Set Initial Gains: Start with setting the integral and derivative gains to zero. Increase the proportional gain until the system oscillates, then back it off by about 30%.
- Step 2: Adjust Integral Gain: Slowly increase the integral gain until the system reaches the desired setpoint in a timely manner without steady-state error.
- Step 3: Fine-Tune Derivative Gain: Introduce the derivative gain to reduce overshoot and improve stability. Adjust it until the system responds quickly to changes without excessive oscillation.
- Step 4: Test and Iterate: Continuously test the system’s response to different conditions and tweak the gains as necessary to achieve the desired performance.
Remember, tuning is often an iterative process. The environment and conditions in which the PID controller operates can affect its performance, so adjustments may be periodically necessary.
Common Mistakes to Avoid
When working with PID controllers, some common pitfalls can hinder performance. Here are some mistakes to watch out for:
- Over-Tuning: Too aggressive tuning can lead to system instability and oscillations. It’s important to strike a balance between response speed and stability.
- Ignoring System Dynamics: Each system has unique dynamics. Not considering factors like time delays and nonlinearities can result in poor tuning.
- Neglecting External Disturbances: Failing to account for external factors affecting the system can lead to suboptimal controller performance. It’s crucial to consider these disturbances during the tuning process.
- Skipping Regular Maintenance: Systems evolve over time, and so should your PID settings. Regularly review and adjust your PID controller to maintain optimal performance.
Real-World Examples
PID controllers are ubiquitous in various industries. Here are a few examples of their applications:
- Temperature Control: In HVAC systems, PID controllers maintain the desired temperature by adjusting heating or cooling outputs based on the current room temperature.
- Speed Control: In automotive cruise control systems, PID controllers maintain the vehicle’s speed by adjusting the throttle position in response to changes in terrain and wind resistance.
- Position Control: In robotics, PID controllers are used to ensure precise movement and positioning of robotic arms by adjusting motor inputs based on positional feedback.
- Flow Control: In chemical processing, PID controllers regulate the flow of liquids and gases to maintain desired reaction conditions, ensuring consistent product quality.
These examples illustrate the versatility and effectiveness of PID controllers in achieving precise control across various domains.
Final Thoughts
PID controllers are the unsung heroes of automation and control systems. Their ability to provide precise, stable control in a wide range of applications makes them indispensable in both industrial and consumer settings. By understanding how they work and how to tune them properly, you can unlock their full potential and improve the performance of your systems. Whether you’re controlling the temperature of a room or the speed of a motor, a well-configured PID controller can make all the difference. So next time you encounter a PID controller, remember the balance it brings to the systems that shape our world.