Imagine trying to balance a broomstick on your finger. At first, it wobbles, but with practice, you learn to adjust your hand to keep it upright. This intuitive balancing act is similar to what a PID controller does, except it’s inside machines, making everything from your car to industrial robots function smoothly and efficiently.
What Is a PID Controller?
A PID controller, short for Proportional-Integral-Derivative controller, is a control loop feedback mechanism widely used in industrial control systems. It calculates an “error” value as the difference between a desired setpoint and a measured process variable. The controller attempts to minimize this error by adjusting the process inputs. Think of it as the brain behind the automation that ensures processes stay on track and perform optimally.
The PID controller combines three different control actions: proportional, integral, and derivative. Here’s a quick breakdown:
- Proportional (P): This part considers the present error. It produces an output value that is proportional to the current error value. The larger the error, the more correction is applied.
- Integral (I): This component focuses on the accumulation of past errors. If the error persists over time, the integral action adds up the error and applies a correction to eliminate residual steady-state error.
- Derivative (D): The derivative part looks at the potential future trend of the error, based on its rate of change. It provides a control action that is proportional to the rate of change of the error, helping to dampen the system and improve stability.
How It Works
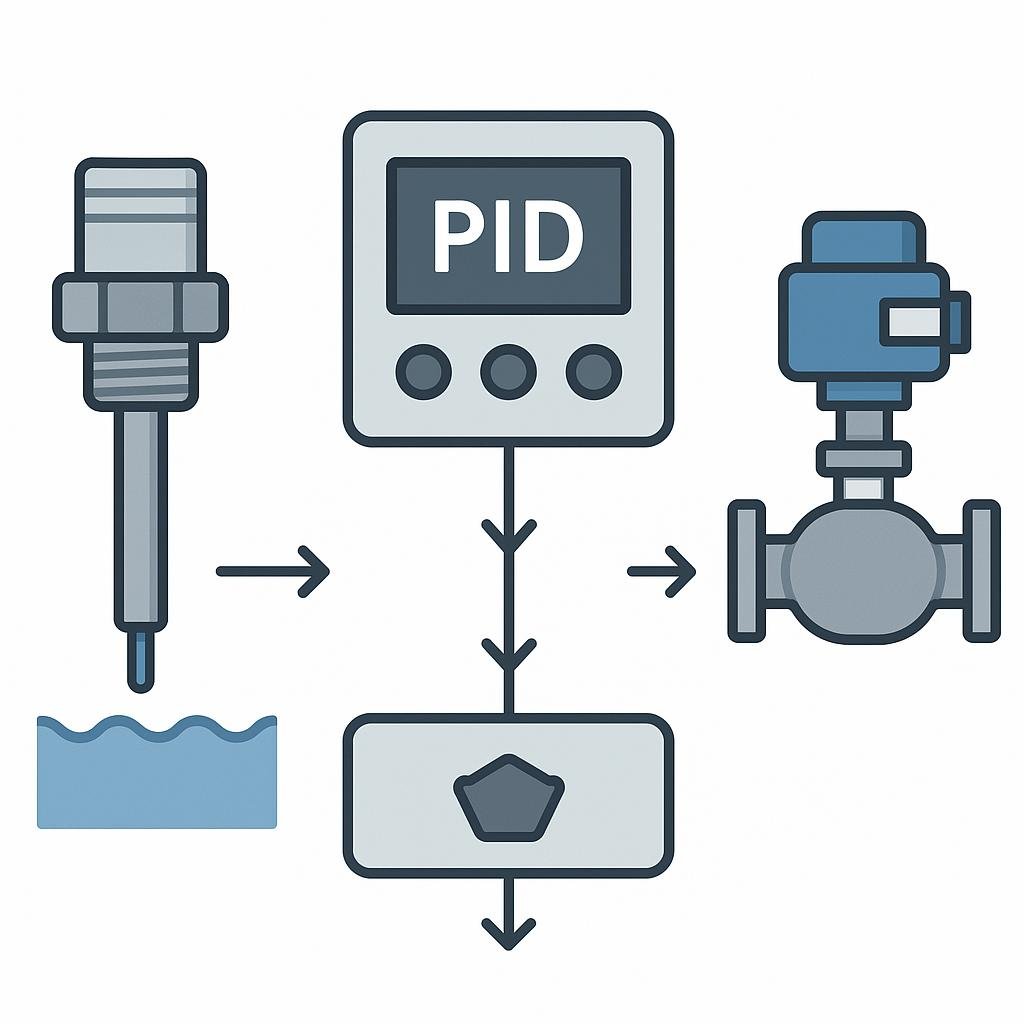
Now that we know what a PID controller is, let’s dive into how it actually works. A PID controller continuously calculates an error value e(t) as the difference between a desired setpoint SP and a measured process variable PV. The controller applies a correction based on three terms:
- Proportional Term (P): The proportional term produces an output value that is proportional to the current error value. The proportional response can be adjusted by multiplying the error by a constant
Kp, known as the proportional gain. A higherKpvalue will increase the control action. - Integral Term (I): The integral term is concerned with the accumulation of past errors. It is calculated by multiplying the integral gain
Kiby the sum of past errors. The integral action adjusts the controller output to eliminate residual steady-state error. - Derivative Term (D): This term predicts future error, based on its rate of change. By multiplying the rate of change by the derivative gain
Kd, the derivative term provides a damping effect that can improve system stability and response time.
The combined output of these three terms is used to control the process. The beauty of the PID controller lies in its ability to be tuned specifically for any given system, providing the right balance of P, I, and D for optimal performance.
Step-by-Step Guide to Tuning a PID Controller
Tuning a PID controller is crucial to ensure that it performs efficiently. Here’s a step-by-step guide to help you through the process:
- Identify the Process: Before tuning, it’s important to have a clear understanding of the system you are working with, including its dynamics and response characteristics.
- Set Initial Parameters: Begin by setting initial values for
Kp,Ki, andKd. A common starting point isKp= 0.5,Ki= 0.1, andKd= 0.01. These values can be adjusted as needed. - Tune the Proportional Gain (Kp): Increase the proportional gain until the system starts to oscillate, then reduce it to about half that value. This will give you a good baseline for the proportional control.
- Adjust the Integral Gain (Ki): Gradually increase the integral gain until any steady-state error is corrected quickly but without causing instability or excessive oscillations.
- Fine-tune the Derivative Gain (Kd): Introduce and adjust the derivative gain to improve system stability and response time, especially if the system is prone to overshooting.
- Test and Iterate: After setting the initial parameters, test the controller’s performance in real-world conditions. Adjust the gains incrementally, and test again until the desired performance is achieved.
Common Mistakes to Avoid
While tuning a PID controller can greatly enhance system performance, it’s also easy to make mistakes. Here are some common pitfalls to watch out for:
- Over-reliance on One Term: Avoid relying too heavily on one of the PID terms. A balanced approach ensures better control performance.
- Ignoring System Dynamics: Each system has unique dynamics. Failing to consider these can lead to poor tuning and suboptimal performance.
- Too Fast, Too Soon: Rapid changes in gains can destabilize the system. Make incremental adjustments and observe the effects.
- Lack of Testing: Failing to thoroughly test the system under various conditions can lead to unexpected behavior in real-world applications.
Real-World Examples
PID controllers are everywhere, silently ensuring that systems run smoothly. Here are some real-world examples of their application:
- Temperature Control: In HVAC systems, PID controllers maintain the desired temperature by adjusting the heating or cooling elements based on the difference between the setpoint and the actual temperature.
- Industrial Automation: In manufacturing plants, PID controllers regulate the speed of conveyor belts, ensuring precise control over production processes.
- Automotive Systems: Cars use PID controllers in cruise control systems to maintain a constant speed by adjusting the throttle based on the current speed and the desired setpoint.
- Robotics: In robotics, PID controllers help in precise position and speed control, allowing robots to perform complex tasks accurately.
Final Thoughts
The PID controller is a fundamental component in modern control systems, providing a reliable and efficient means of maintaining the stability and performance of various processes. By understanding how PID controllers work and learning how to tune them properly, you can harness their full potential to optimize performance in a multitude of applications. Whether you’re an engineer, a technician, or simply a curious tech enthusiast, mastering PID controllers can open up a world of possibilities in automation and control.