If you’ve ever marveled at how modern systems maintain stability, whether in your car’s cruise control or an industrial furnace, chances are behind the scenes, a PID controller is at work, quietly ensuring everything runs smoothly. But what exactly is a PID controller, and how does it manage to keep such a fine balance in dynamic systems?
What Is a PID Controller?
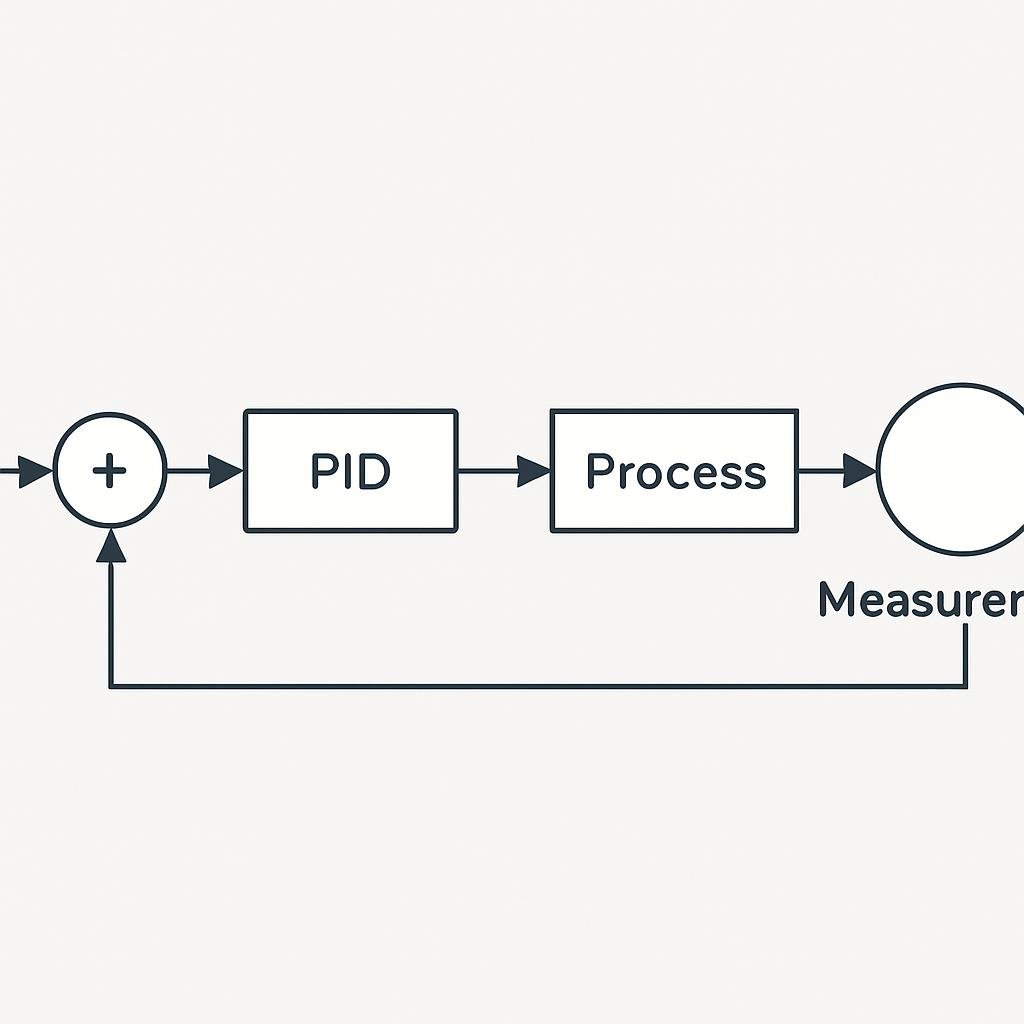
A PID controller stands for Proportional-Integral-Derivative controller, a control loop feedback mechanism widely used in industrial control systems. It is one of the most reliable and straightforward control mechanisms used to regulate temperature, speed, position, and other process variables. The PID controller continuously calculates an error value as the difference between a desired setpoint and a measured process variable. It applies a correction based on proportional, integral, and derivative terms, hence the name.
The beauty of a PID controller lies in its simplicity and versatility. It is used in a range of applications, from controlling the temperature of a room to maintaining the speed of a car or the altitude of an aircraft. Its ability to automate processes accurately makes it indispensable in various engineering and performance-related fields.
How It Works
The PID controller works by adjusting the control input to a system to maintain the desired output. It uses three main components:
- Proportional (P): This component produces an output value that is proportional to the current error value. If the error is large, the corrective action is also large. However, relying solely on proportional control can lead to steady-state errors.
- Integral (I): This part of the controller accumulates the error over time and aims to eliminate residual steady-state errors that the proportional component cannot address. It adjusts the process to minimize the accumulated error.
- Derivative (D): This component predicts future errors based on the rate of error change. It helps dampen the process response, preventing the system from overshooting the setpoint.
Each component plays a crucial role in fine-tuning the system’s response. By adjusting the proportional, integral, and derivative parameters, engineers can tailor the controller’s behavior to suit specific needs, ensuring stable and precise control.
Step-by-Step Guide to Tuning a PID Controller
Setting up a PID controller requires understanding the system you are working with and careful tuning of the PID parameters. Here’s a practical step-by-step guide:
- Identify the Process: Clearly define the process you want to control. Understand the dynamics and constraints of the system.
- Initial Setup: Start by setting the integral and derivative gains to zero. Increase the proportional gain until you achieve a desired level of response, but be cautious of oscillations.
- Adjust the Integral Gain: Slowly increase the integral gain to address any steady-state error. This will help the system reach the setpoint accurately.
- Fine-tune with Derivative Gain: Introduce the derivative gain to reduce overshoot and improve stability. This will help the system quickly respond to changes without oscillating.
- Test and Refine: Conduct tests under different conditions to ensure the controller maintains performance. Fine-tune the gains as necessary based on real-world performance.
Tuning a PID controller can often be an iterative process, requiring adjustments and testing to find the optimal balance for your specific application.
Common Mistakes to Avoid
While working with PID controllers, several common pitfalls can affect performance. Here are some to watch out for:
- Over-reliance on Proportional Gain: High proportional gain can lead to unstable systems with excessive oscillations.
- Neglecting the Integral Component: Ignoring the integral component can lead to persistent steady-state errors, especially in systems requiring precise control.
- Too Much Derivative Action: Excessive derivative gain can amplify noise, leading to erratic control responses.
- Lack of Understanding of System Dynamics: Without a good grasp of the system’s behavior, tuning a PID controller becomes guesswork, often leading to unsatisfactory results.
- Inadequate Testing: Failing to test the controller under various conditions can result in suboptimal performance or unexpected behavior in real-world applications.
By being mindful of these mistakes, you can ensure a more reliable and effective implementation of PID control in your projects.
Real-World Examples
PID controllers are pervasive across numerous industries and applications. Let’s explore a few real-world examples:
- Automotive Control Systems: In automotive applications, PID controllers are used in cruise control systems to maintain a vehicle at a set speed despite changes in road gradients or vehicle load.
- Temperature Regulation: In HVAC systems, PID controllers manage temperature settings to maintain a comfortable environment, adjusting heating or cooling outputs based on room conditions.
- Industrial Automation: In factories, PID controllers manage process control systems like pressure, flow, and level control, ensuring efficient and stable operations.
- Robotics: In robotics, PID controllers are vital for maintaining precise motion control, ensuring robots move smoothly and accurately along desired trajectories.
These examples illustrate the versatility of PID controllers and their critical role in enhancing system performance across various fields.
Final Thoughts
PID controllers are a fundamental component of modern control systems, offering simplicity and reliability in managing complex processes. By understanding the principles behind proportional, integral, and derivative control, and by carefully tuning these parameters, engineers can achieve exceptional control over a wide range of applications.
Whether you’re a seasoned engineer or a hobbyist exploring control systems, mastering PID controllers can open up new possibilities in automation and process optimization. As technology evolves, the principles of PID control remain as relevant as ever, providing a robust foundation for innovation and efficiency in engineering and performance-critical systems.